Teledetekcja i fotogrametria obszarów leśnych
Fotogrametria i teledetekcja to dziedziny zajmujące się określaniem położenia, wymiarów i kształtu obiektów, a także wykrywaniem, rozpoznawaniem i charakterystyką obiektów, procesów i zjawisk na podstawie rejestracji promieniowania elektromagnetycznego odbitego lub emitowanego przez różnego rodzaju obiekty środowiskowe.
Fotogrametrię należy łączyć z takimi zadaniami, jak odtwarzanie kształtów, rozmiarów i wzajemnego położenia obiektów w terenie, a więc obejmuje metody pomiaru terenu i/lub obiektów przestrzennych na podstawie ich zdjęć i uzyskiwanie dla tych obiektów współrzędnych (x, y). Pracując na modelu stereoskopowym lub na danych z lotniczego skanowania laserowego, można uzyskać współrzędną wysokościową (z).
Teledetekcja natomiast ukierunkowana jest na zdalne pozyskanie, przetwarzanie i interpretowanie informacji jakościowych o obiektach, zjawiskach i procesach na powierzchni Ziemi.
W leśnictwie te dwie dziedziny geomatyki – fotogrametria i teledetekcja – przenikają się, gdyż z jednej strony interesuje nas geometria obiektów, a z drugiej - treść zdjęcia i jego interpretacja (na przykład wybranych elementów taksacyjnych).
W Polsce początki fotogrametrii datuje się na wczesne lata 20. ubiegłego stulecia. Natomiast pojęcie teledetekcji zastosowano po raz pierwszy w USA na początku lat 60. minionego wieku.
Teledetekcja i fotogrametria może znaleźć zastosowanie w wielu działach gospodarki leśnej, m.in. w takich jak: urządzanie lasu, ochrona lasu, zagospodarowanie lasu, użytkowanie lasu, stan posiadania, łowiectwo.
Zdjęcia lotnicze i satelitarne rejestrowane w zakresach optycznych
Produktem fotogrametrycznym często wykorzystywanym w leśnictwie jest ortofotomapa. Zdjęcia przetworzone do postaci ortofotomapy mają jednolitą skalę na całej powierzchni opracowania, a obiekty terenowe przedstawione są w swym rzeczywistym położeniu. Cyfrowa ortofotomapa to zdjęcie kartometryczne posiadające powiązanie z określonym układem współrzędnych, a więc może stanowić jedną z warstw systemu informacji przestrzennej i być analizowane w powiązaniu z innymi warstwami (np. warstwami LMN).
Ryc. Leśna Mapa Numeryczna wyświetlona na tle ortofotomapy w przeglądarce LIMES
Teledetekcja to technologia zajmująca się przetwarzaniem i interpretacją informacji jakościowych o obiektach, zjawiskach i procesach zachodzących na powierzchni Ziemi na podstawie rejestracji promieniowania elektromagnetycznego. Analiza teledetekcyjna polega na przetwarzaniu obrazu oraz jego interpretacji wizualnej lub klasyfikacji cyfrowej.
Przykładem interpretacji danych teledetekcyjnych są m.in.: mapa klasyfikacyjna (lub fotointerpretacyjna), sklasyfikowana chmura punktów z lotniczego skanowania laserowego.
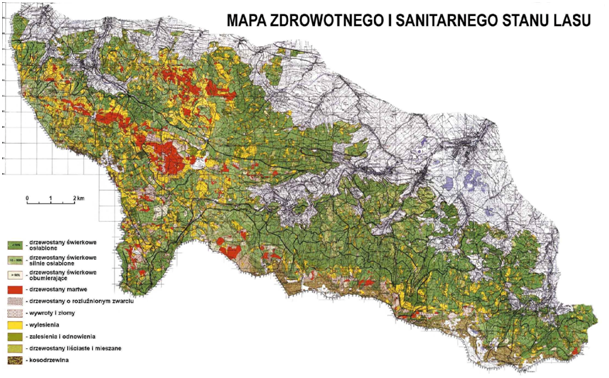
Ryc. Mapa zdrowotnego i sanitarnego stanu lasów dotkniętych klęską ekologiczną w Sudetach Zachodnich, wykonana w 1984 r. na podstawie interpretacji barwnych zdjęć w podczerwieni. Wyniki interpretacji naniesiono na mapę topograficzną w skali 1:25 000 (źródło: Iracka i in. 2000).
Teledetekcja, podobnie jak i fotogrametria, wykorzystuje słoneczne promieniowanie elektromagnetyczne, promieniowanie emitowane przez obiekty (głównie cieplne i mikrofalowe), a także promieniowanie generowane przez specjalistyczne urządzenia (radary i lidary). W teledetekcji zastosowanie mają te z fal, które przenikają przez atmosferę (zakres widzialny, mikrofale, wybrane pasma podczerwieni) i pozwalają na szczegółową interpretację zjawisk zachodzących na powierzchni ziemi (np. do interpretacji szaty roślinnej niezwykle przydatna jest podczerwień).
Dlaczego, poza światłem widzialnym, warto wykorzystywać także inne zakresy promieniowania elektromagnetycznego?
Każdy obiekt odbija promieniowanie elektromagnetyczne w charakterystyczny sposób, a wykres takiego odbicia nosi nazwę krzywej spektralnej lub krzywej odbicia spektralnego.

Ryc. Krzywe odbicia spektralnego gleby, roślinności i wody.
Przebieg krzywej spektralnej roślinności w zakresie widzialnym (0,4 – 0,7 μm) ma minima w przedziale niebieskim (0,4-0,5 µm) i czerwonym (0,6-0,7 µm) oraz maksimum w zakresie zielonym (0,5-0,6 µm). Minima te są wynikiem pochłaniania promieniowania wykorzystywanego w procesie fotosyntezy. Natomiast odbicie zakresu zielonego skutkuje tym, że roślinność postrzegamy w barwie zielonej.
Warto podkreślić, że rośliny zielone odbijają różne zakresy promieniowania w różnych proporcjach, ale zawsze przebieg krzywej spektralnej zielonych części roślin będą charakteryzowały minima w przedziałach niebieskim i czerwonym oraz maksimum w zakresie zielonym oraz bardzo wyraźny wzrost odbicia w bliskiej podczerwieni. W przypadku przebarwień liści/igieł te proporcje ulegają zmianie.
Zastosowanie zobrazowań rejestrowanych w poszczególnych zakresach spektralnych:
• Zakres niebieski znajduje zastosowanie w analizach wód, batymetrii, sedymentacji, geologii oraz odróżnianiu roślinności od odkrytej gleby.
• Zakres zielony – to maksimum odbicia od roślin zakresu widzialnego. Służy do określania kondycji roślin, sedymentacji wód oraz analizom geologicznym.
• Zakres czerwony – to przedział pochłaniania w procesie fotosyntezy. Jest stosowany do określania typów roślinności, a także w geologii.
• Bliska podczerwień – wykorzystywana jest w analizach kondycji roślin.
• Średnia podczerwień – stosowana jest w analizach kondycji roślin oraz wilgotności gleb, a także do odróżniania chmur od śniegu oraz w geologii.
• Podczerwień termalna – stosowana jest do określania termalnych właściwości obiektów.
Z punktu widzenia analiz prowadzonych dla obszarów leśnych optymalnym rozwiązaniem jest pozyskiwanie zdjęć wielospektralnych rejestrujących nie tylko odbicie w zakresie promieniowania widzialnego, ale także jeden lub kilka zakresów podczerwieni.
Dlatego też zobrazowania korzystające nie tylko z zakresów promieniowania widzialnego przedstawione są w barwach umownych (nierzeczywistych).
Kompozycje wykorzystujące następujące zakresy: zielony, czerwony i bliską podczerwień nazywane są zdjęciami spektrostrefowymi (zdjęciami barwnymi w podczerwieni, kompozycją CIR z ang. Color Infrared). Roślinność na nich jest przedstawiona w czerwieni lub purpurze. Natomiast kompozycja stworzona z kanałów zarejestrowanych w zakresach widzialnych: niebieskim, zielonym i czerwonym nazywana jest kompozycją w barwach naturalnych (kompozycją RGB z ang. red, green, blue).


Ryc. Przykład zdjęć w barwach naturalnych (RGB) i w barwach umownych (CIR)
Spośród informacji o obszarach leśnych, które można uzyskać ze zdjęć, należy wymienić dwie kategorie:
• I – pozwalająca opisać stan powierzchni obszaru leśnego, np. strukturę gatunkową i wiekową, zwarcie pułapu koron, występowanie luk, zwartość kompleksu leśnego itp.;
• II – pozwalająca opisać jakościowy stan koron drzew, przejawiający się zasobnością koron w liście lub igły oraz ich barwą, a także formą koron (Bychawski 1980).
Pierwszą z wymienionych kategorii nie zawsze dostarczają zdjęcia barwne w podczerwieni. Informacje te można również pozyskać ze zdjęć w barwach naturalnych, zdjęć panchromatycznych (czarno-białe w zakresie widzialnym) czy czarno-białych w podczerwieni. Druga kategoria wymaga już jednak wykorzystania zdjęć, które umożliwiają ocenę stanu aparatu asymilacyjnego, a więc zdjęć pokazujących odbicie promieniowania elekromagnetycznego od drzew czy fragmentów drzewostanów, w zakresie bliskiej podczerwieni i wybranych zakresów promieniowania widzialnego, a więc w technice barwnych zdjęć w podczerwieni (CIR).
Znamienną cechą zdjęć wykorzystujących bliską podczerwień jest możliwość rozróżniania na nich barwy roślinności związanej z różnicami w budowie aparatu asymilacyjnego drzew, a także pogarszania się ich kondycji (głównie drzew iglastych). Dlatego poprzez takie zobrazowania można nie tylko odróżnić drzewa liściaste od iglastych, ale też zebrać informacje o: gatunkach budujących drzewostan, występowaniu martwych i uszkodzonych drzew w drzewostanie, zróżnicowaniu kondycji drzew żyjących, występowaniu częściowych uszkodzeń w koronach drzew i udatności nowych nasadzeń. Wykonanie tak szczegółowej analizy wymaga prowadzenia interpretacji na dobrych jakościowo zdjęciach o odpowiednio dużej skali, wykonanych we właściwej fazie fenologicznej roślin (znacząco wpływającej na barwę i jasność spektralną roślin) oraz w odpowiedniej porze dnia (wysokości Słońca).
Zatem przy ocenie cech drzewostanów istotna jest relacja pomiędzy nimi a ich barwą na zdjęciach (wynikającą z wartością odbicia spektralnego) i niezbędna jest znajomość relacji pomiędzy obrazem lasu na zdjęciu a jego charakterystyką terenową.
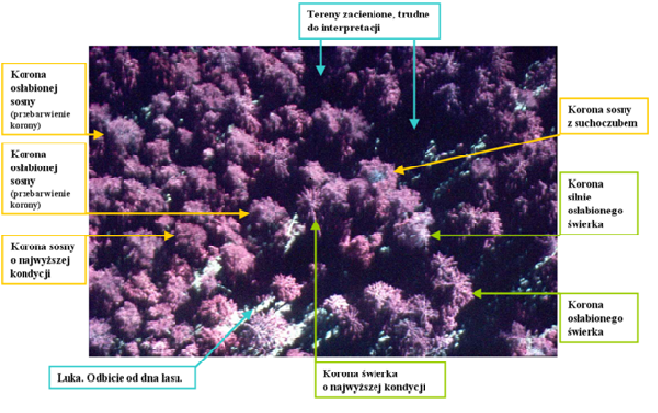
Ryc. Barwne zdjęcie lotnicze w podczerwieni (CIR) z widocznymi koronami świerków i sosen o różnej kondycji. Interpretacja wizualna wybranych elementów lasu na pojedynczym zdjęciu (źródło: „Geomatyka w Lasach Państwowych. Część II. Poradnik praktyczny", CILP, Warszawa 2013)
Oprócz zakresów spektralnych istotna jest też rozdzielczość przestrzenna zdjęcia. Ta cecha w minionych latach mocno różniła zdjęcia lotnicze i satelitarne. Te drugie charakteryzowały się rozdzielczościami kilkudziesięciu metrów lub pojedynczych metrów, gdy na zdjęciach lotniczych możliwa była analiza elementów rzędu kilkudziesięciu, a czasem i kilkunastu centymetrów. Obecnie to zróżnicowanie pomiędzy segmentem lotniczym i satelitarnym zmniejsza się, ponieważ możliwe jest już pozyskiwanie zdjęć satelitarnych o rozdzielczości przestrzennej poniżej 0,5 metra.
Warto podkreślić, że wybór rodzaju zobrazowań do analiz powinien być uzależniony od: celu opracowania, skali (szczegółowości) opracowania oraz dokładności danych przestrzennych, z którymi dane zobrazowanie będzie porównywane, a także dostępności i oferowanej ceny zdjęć.
Literatura:
- Bychawski W., 1980: Zastosowanie lotniczych zdjęć spektrostrefowych do określania stref przemysłowego zagrożenia drzewostanów sosnowych. Prace IGiK, t. XXVII, z. 66 (rozdz. 4.2)
- Iracka M., Zawiła-Niedźwiecki T., Wiśniewska E., 2000: Remotely sensed monitoring of forest decline in the Sudety Mountains – 1976-1999. [w:] Zawiła-Niedźwiecki T., Brach M. (red,): EUR 19530 – Remote Sensing and Forest Monitoring JRC/WAU/IUFRO Conference Proceedings. Office for Official Publications of the European Communities Luxembourg, s. 643-658.
Lotnicze skanowanie laserowe (ALS)
(na podstawie „Geomatyki w Lasach Państwowych. Część I. Podstawy", rozdział 14.5 „Skaning laserowy" autorów: K.Będkowskiego i P.Wężyka)
Technika skaningu laserowego, znana też pod akronimem LIDAR (ang. Light Detection and Ranging) zaliczana jest do aktywnych systemów teledetekcyjnych. W skład systemu LIDAR wchodzą: emiter (urządzenie generujące wiązkę światła laserowego) oraz odbiornik (detektor), czyli urządzenie rejestrujące powracającą po odbiciu wiązkę danych. W wypadku terenów odkrytych (brak szaty roślinnej i infrastruktury) wiązka padająca, po odbiciu od powierzchni ziemi, powraca do detektora i jest rejestrowana. Sytuacja się komplikuje, gdy teren pokryty jest roślinnością (lasy, krzewy etc.) lub liniami energetycznymi. Wówczas impuls w postaci plamki światła jest rozpraszany i odbijany od kilku obiektów jednocześnie. W ten sposób rejestrowane są promienie odbite zarówno od powierzchni terenu, jak i koron drzew (nawet na kilku jej wysokościach). Podstawowym produktem lotniczego skanowania laserowego (ang. Airborne Laser Scanning; ALS) jest chmura punktów o znanych współrzędnych przestrzennych (X, Y, Z), które są miejscami odbić promieni lasera od napotkanych przeszkód. Rejestrowane mogą być też: intensywność (ang. intensity) odbicia impulsu oraz kolejne echa sygnału (tzn. pierwsze – First Echo i ostatnie – Last Echo).
Sposób odbicia promieniowania lasera od obiektów terenowych zależy od rodzaju ich powierzchni, a także ich struktury wewnętrznej. Promieniowanie laserowe podlega znanym z fizyki prawom, tzn. może być całkowicie odbijane (od gładkich powierzchni, np. dachów samochodów), może też być całkowicie pochłonięte (przez wodę w zakresie bliskiej podczerwieni – NIR, szczególnie te padające prostopadle do powierzchni lustra wody). Zasada działania skaningu laserowego oparta jest na wyznaczeniu odległości od skanera do badanej powierzchni za pomocą pomiaru czasu (Δt) upływającego pomiędzy wysłaniem a odbiorem pojedynczego impulsu laserowego w wypadku skanerów impulsowych (ang. Time-of-Flight), przy znajomości wartości prędkości rozchodzenia się światła (stała c = 299 792 458 m/s w próżni). Dodatkowo w celu określenia przestrzennego położenia punktu ALS znane muszą być wartości kąta, pod jakim wysłano wiązkę, aby wyznaczyć wektor przestrzenny (OFFSET) od znanej pozycji skanera w układzie X, Y, Z.
Dane ALS po wstępnym przetworzeniu („matching" oraz nadanie georeferencji) mają tzw. znacznik czasu GPS, tzn. każdy punkt z wygenerowanej chmury punktów otrzymuje informacje o czasie jego pozyskania (UTC), współrzędnych X, Y oraz Z, kolejności odbicia (np. FE czy drugie echo z czterech odbić), kącie wysłania impulsu, intensywności odbicia, numerze szeregu (skanu) i jego kierunku oraz inne zdefiniowane przez użytkownika cechy (np. oznaczenie skanera w wypadku stosowania większej ich liczby). Dane ALS na tym stopniu przetworzenia mogą być przekazywane odbiorcy w postaci plików ASCII bądź też w coraz bardziej uznanym w świecie formacie binarnym LAS (przyjętym przez ASPRS – American Society for Photogrammetry and Remote Sensing), obsługiwanym przez wiele programów. Format LAS zapewnia także przechowywanie informacji o przynależności punktu do odpowiedniej klasy zdefiniowanej przez ASPRS.
Przy analizie danych ALS obszarów leśnych należy brać pod uwagę zjawisko częściowego odbijania impulsów laserowych przez elementy drzew (korony, konary, pnie), niżej położone krzewy (podszyt, podrost) oraz rośliny dna lasu i istniejącą infrastrukturę, np. kabel telefoniczny.

Ryc. Obraz chmury punktów ALS. Profil: szerokość 10 m, gęstość ok. 20 pkt/m2 (źródło: ProGea Consulting; Zakopane 2007)
Powierzchnia, interpolowana na podstawie pierwszych powracających impulsów (FE), przebiega albo po koronach drzew, albo na pewnej wysokości nad terenem (roślinność zielna, niskie krzewy), albo bezpośrednio po terenie. Uzyskiwane wyniki zależą od gęstości pokrywy roślinnej oraz jej zmienności w okresie wegetacyjnym. Możliwość zarejestrowania kształtu pojedynczych drzew i krzewów zależy od gęstości punktów pomiarowych oraz śladu rozrzutu wiązki po obiektach. Podstawowym problemem związanym ze skanowaniem obszarów pokrytych roślinnością drzewiastą jest opracowanie sposobu odróżniania impulsów odbitych od drzew – od odbijanych przez grunt. Impulsy pochodzące z odbić od dna lasu mogą być wykorzystane do modelowania bardzo precyzyjnego NMT, na którego podstawie możliwe jest nawet badanie śladów dawnego rolniczego zagospodarowania terenu czy też osadnictwa. Natomiast impulsy odbijane przez elementy pokrycia terenu (korony drzew, infrastruktura etc.) umożliwiają na tworzenie numerycznych modeli pokrycia terenu (NMPT).
W aplikacjach z zakresu leśnictwa wykorzystywany może być zarówno NMT, jak i NMPT. Ponadto w wypadku skanowania drzewostanów i analizy warstwy koron często mamy do czynienia z numerycznym modelem koron (ang. Crown Height Model – CHM), który ze względów praktycznych poddaje się tzw. normalizacji. Zabieg ten ma za zadanie operowanie wartościami względnymi wysokości zarejestrowanych koron. Najczęściej stosowanym określeniem w wypadku modelowania danych ALS jest nDSM, czyli znormalizowany NMPT (zNMPT), którego wartości wskazują na względne wysokości obiektów (domów, drzew). Normalizację można przeprowadzać zarówno na „surowych" chmurach punktów, jak i na powierzchniach rastrowych (map algebra). Generowanie modelu CHM odbywać się może przy uwzględnieniu lokalnych maksimów (zachowania wierzchołków drzew) lub też stosowaniu różnego rodzaju filtrów wygładzających (medianowych czy Gaussa). Powstałe powierzchnie (CHM) służą często licznym analizom z zakresu pozyskiwania informacji o drzewostanie.
Leśnicy zainteresowani są przede wszystkim sposobami określania wielkości charakteryzujących drzewostany, które są istotne z punktu widzenia opisu ich rozwoju do planowania czynności hodowlanych oraz na potrzeby inwentaryzacji wielkości zapasu drewna. Do najważniejszych cech taksacyjnych i parametrów opisujących drzewostany, możliwych do bezpośredniego lub pośredniego określenia na podstawie wyników skanowania laserowego należą: wysokość (pojedynczych drzew i średnia wysokość drzewostanu; wysokość 100 najwyższych drzew – wysokość górna), zwarcie koron, liczba drzew (zagęszczenie), obecność luk i gniazd, a pośrednio także wielkości silnie skorelowane z wymienionymi, np. pierśnica czy zapas drzewostanu (wielkość biomasy).

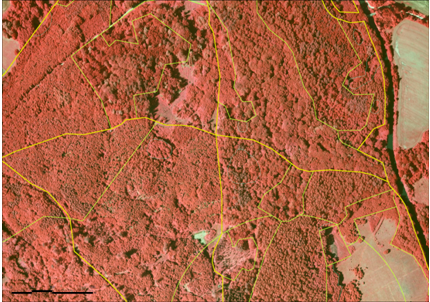
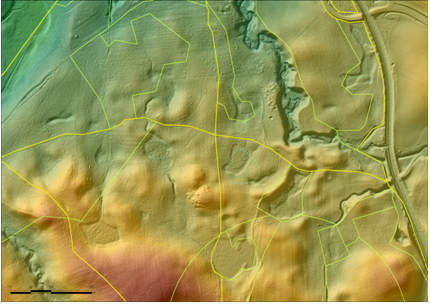
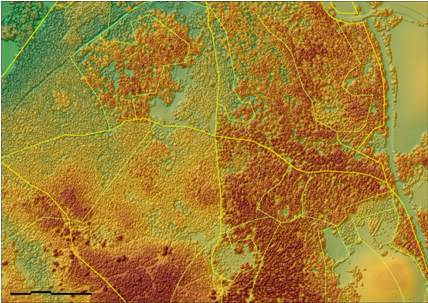
Ryc. Wizualizacja fotogrametrycznego zdjęcia lotniczego i danych z lotniczego skanowania laserowego (ALS) z nałożonymi granicami oddziałów i pododdziałów: a – zdjęcie lotnicze - kompozycja w barwach naturalnych (RGB); b – zdjęcie lotnicze - kompozycja w barwach umownych (CIR); c – wizualizacja numerycznego modelu terenu (NMT) wygenerowanego z chmury punktów ALS, d – wizualizacja numerycznego modelu pokrycia terenu (NMPT) wygenerowanego z chmury punktów ALS
Naziemne skanowanie laserowe (TLS)
Technologia naziemnego skanowania laserowego, zwana również TLS (ang. Terrestrial Laser Scanning), nie odbiega co do zasady działania od technologii skanowania lotniczego. Podstawowym produktem wynikowym jest chmura punktów.

Ryc. Naziemny skaner laserowy ustawiony na statywie podczas rejestracji powierzchni próbnej. W tle widoczne kule referencyjne pozwalające na złożenie kilku skanów (autor: P.Strzeliński)
Zależnie od potrzeb stosuje się skanowanie z jednego ustawienia (tzw. skan centralny) oraz skanowanie z wielu ustawień, która to technika (wykorzystując punkty referencyjne) pozwala na złożenie wykonanych zobrazowań w jedną trójwymiarową chmurę punktów, a co za tym idzie uzyskanie pełnego modelu 3D. Podczas obrazowania wymagającego złożenia kilku skanów, konieczne jest wykorzystanie tzw. punktów referencyjnych. Spośród różnych technik najlepsze dokładności można osiągnąć przy stosowaniu kul referencyjnych, których wielkość powinna być uzależniona od odległości pomiędzy poszczególnymi stanowiskami oraz rozdzielczościami skanowania.

Ryc. Fragment drzewostanu zeskanowany z pięciu ustawień (skan środkowy + 4 skany satelitarne); kolory pokazują zakres widoczności poszczególnych skanów (autor: P.Strzeliński)
 a.
a.
 b.
b.
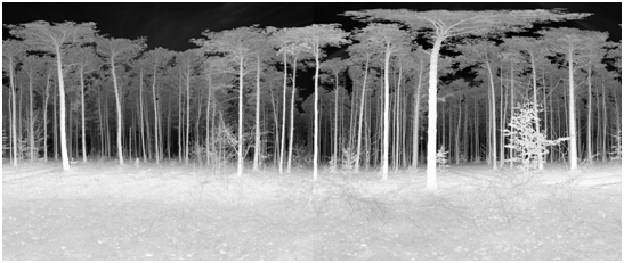
Ryc. Zobrazowanie wykonane naziemnym skanerem laserowym FARO Focus 3D; metoda skanowania – „single scan", kąt poziomy – 360 st., kąt pionowy – 305 st., rozdzielczość – ½.
a – obraz intensywności chmury punktów (w odcieniach szarości) w widoku płaszczyzny (2D)
b – chmura pokolorowana zdjęciami w barwach naturalnych. (autor: P.Strzeliński)
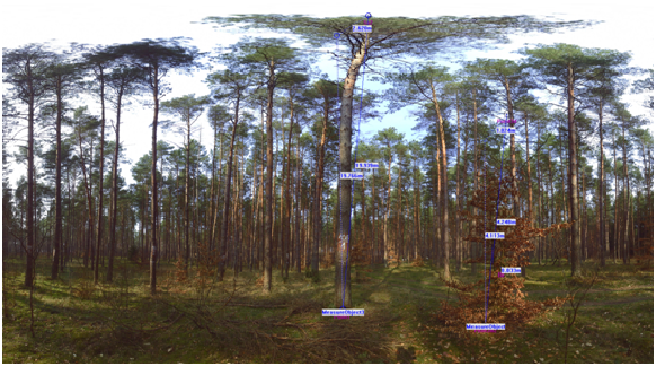
Ryc. Pokolorowana chmura punktów, jako zobrazowanie fotogrametryczne umożliwia pomiar wysokości i średnicy obiektów. (autor: P.Strzeliński)
na bazie publikacji „Geomatyka w Lasach Państwowych cz. 1 i 2" zredagowała Emilia Wiśniewska, DGLP