
 Wydawca treści
Wydawca treści
Systemy pozycjonowania satelitarnego
Globalne systemy nawigacji satelitarnej (Global Navigation Satellite Systems – GNSS) należy rozumieć jako systemy satelitów pozwalających na autonomiczne wyznaczanie położenia w jednolitym układzie odniesienia za pomocą odbiorników sygnałów satelitarnych. Dodatkowe atuty tej technologii, to możliwość określenia dokładnego czasu, ciągłość pracy niezależnie od warunków pogodowych oraz dostęp dla nieograniczonej liczby użytkowników na całym świecie.
Budowy własnych systemów nawigacyjnych podjęło się kilka państw, jednak w praktyce pełną zdolność operacyjną osiągnął jedynie system amerykański GPS Navstar w kwietniu 1995 r. Istotnym ogniwem GNSS jest również rosyjski system Glonass, który wzbogaca konstelację satelitów GPS Navstar, przyczyniając się do wydajniejszej pracy wybranych odbiorników nawigacyjnych.
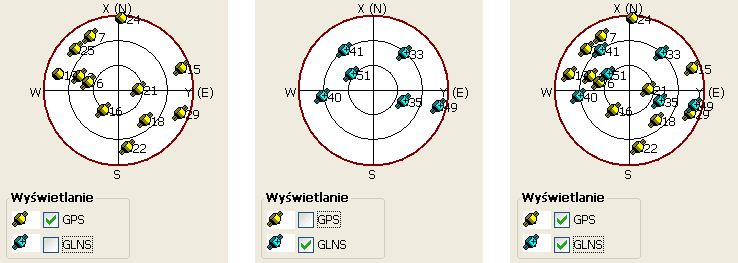
Ryc. Przykładowa konstelacja satelitów GPS Navstar oraz Glonass (GLNS)
Spośród innych systemów nawigacyjnych, znajdujących się na różnych etapach budowy, należy wymienić: Galileo (Unia Europejska), a także mniej przydatne w warunkach Polski: Compass (Chiny) oraz systemy o zasięgu regionalnym IRNSS (Indie) i QZSS (Japonia).
Każdy system nawigacyjny składa się z trzech zasadniczych elementów: segmentu satelitarnego, naziemnego i użytkownika – odbiorników GNSS.
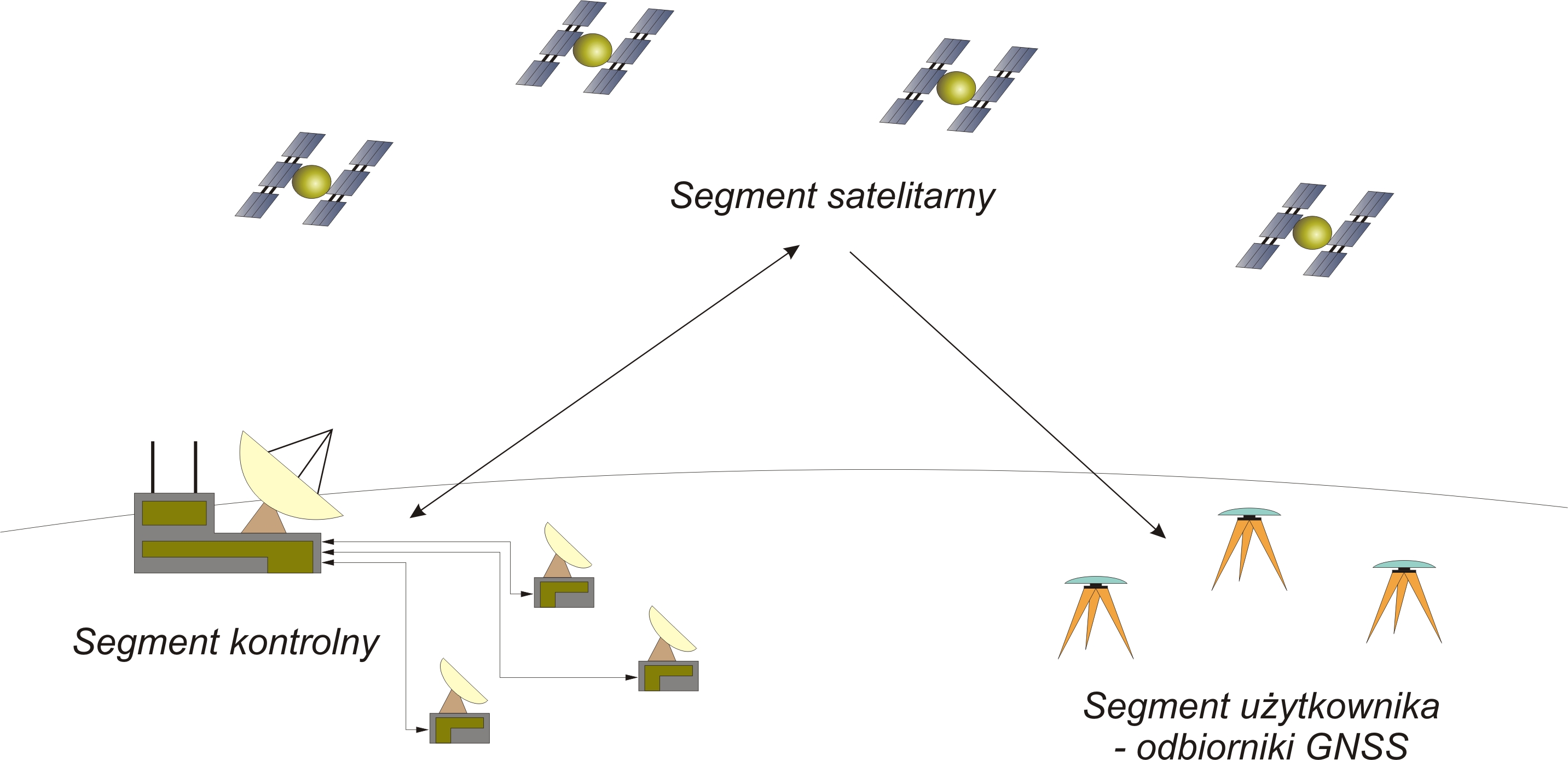
Ryc. Schemat głównych elementów systemów nawigacyjnych
Najpopularniejszym w warunkach Polski jest GPS Navstar. Trzon systemu stanowi segment satelitarny, składający się z konstelacji 21 satelitów uzupełnionych o trzy zapasowe. Rozmieszczone są równomiernie na sześciu orbitach kołowych, nachylonych pod kątem 55° do płaszczyzny równika i na wysokości ok. 20 200 km nad Ziemią. Czas obiegu satelitów to prawie 12 h, a ich ustawienie po cztery na każdej orbicie gwarantuje, że zdecydowana większość użytkowników systemu ma zagwarantowany dostęp do sygnału z minimum pięciu satelitów w dowolnym miejscu na Ziemi, z prawdopodobieństwem 0,9996. W praktyce liczba satelitów jest większa (ponad 30). Taki stan rzeczy podyktowany jest zarówno koniecznością ciągłej modernizacji sprzętu, jak i przygotowaniem do zastąpienia starszych satelitów.
Zasada działania odbiornika nawigacyjnego
Obliczenie współrzędnej X, Y, Z przez procesor odbiornika nawigacyjnego możliwe jest po spełnieniu kilku głównych warunków:
Podstawa wyznaczenia współrzędnej opiera się na zasadach triangulacji przy wykorzystaniu satelitów o znanym położeniu na orbicie. Niezbędne są do tego pomiary odległości od odbiornika do trzech satelitów. Wynik obliczeń pozwala określić położenie odbiornika w dwóch punktach, z których jeden położony jest bardzo wysoko nad powierzchnią Ziemi i tym samym można wykluczyć go z dalszych analiz, drugi zaś wskazuje prawidłową lokalizację. Obliczenie odległości niezbędnych do wyznaczenia współrzędnych realizowane jest dzięki pomiarowi czasu, w jakim sygnał z satelity dociera do odbiornika nawigacyjnego.
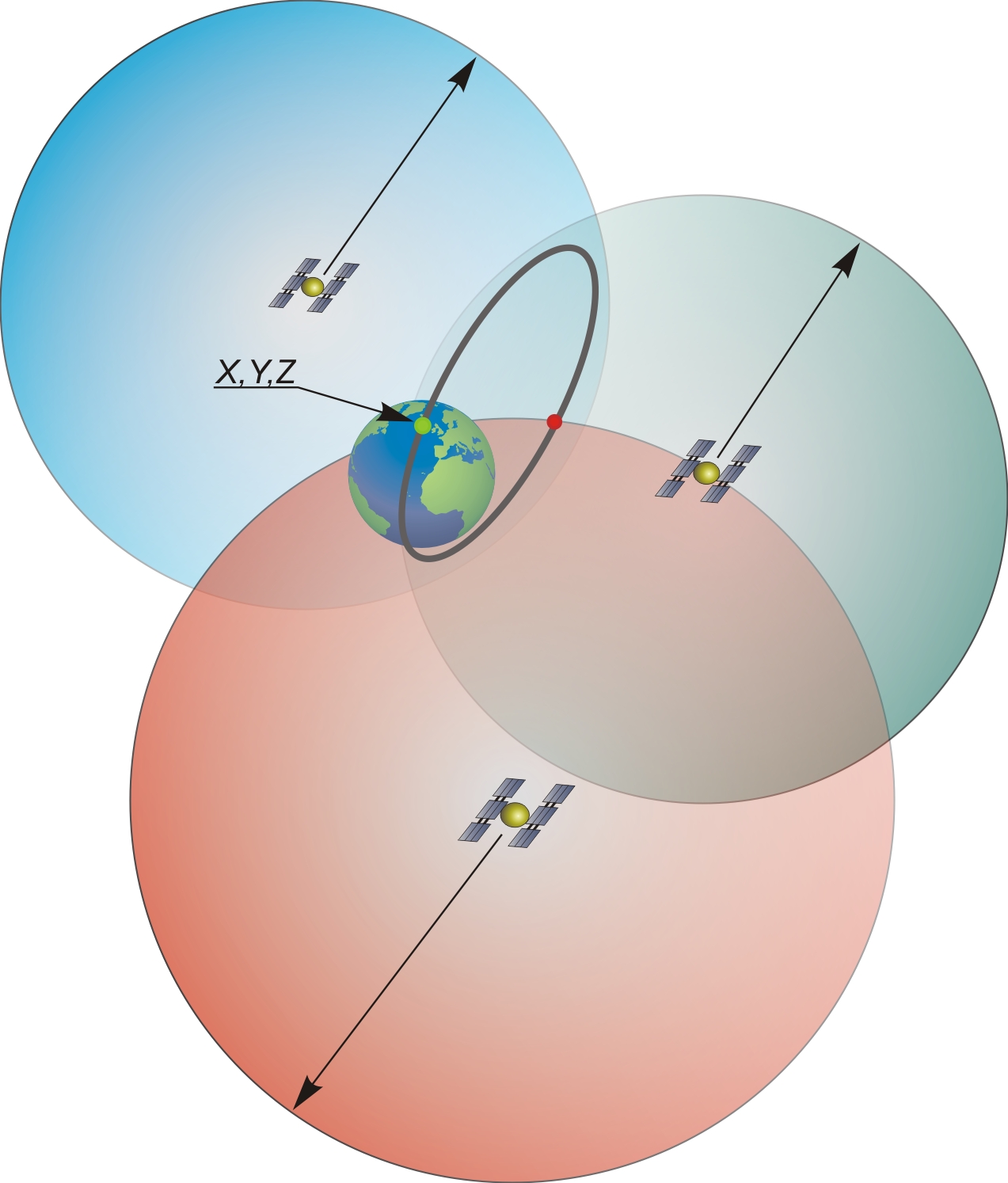
Ryc. Zasada triangulacji w systemach nawigacyjnych
W praktyce pomierzona odległość nie jest dokładna, ponieważ zegar znajdujący się w odbiorniku ma zdecydowanie gorsze parametry niż zegar atomowy satelity. Niedokładność zegara danego odbiornika w wypadku pomiaru trzech odległości jest taka sama. Konieczne jest zatem wykorzystanie sygnału z czwartego satelity i rozwiązanie równania z czterema niewiadomymi:
– długość geograficzna,
– szerokość geograficzna,
– wysokość elipsoidalna,
– błąd pomiaru czasu.
Systemy GNSS zaprojektowano w ten sposób, aby w każdym miejscu na Ziemi możliwy był odbiór minimum czterech sygnałów z satelitów nawigacyjnych; jest to wymagana liczba do wyznaczenia współrzędnych X, Y, Z.
Czynniki obniżające dokładność pomiarów
Istnieje wiele czynników, które wpływają na dokładność wyznaczania współrzędnych w systemach GNSS:
1. Dokładność wyznaczania czasu w odbiorniku jest znacznie gorsza niż na satelitach wyposażonych w zegary atomowe.
2. Znajomość dokładnego położenia danego satelity na orbicie. Wpływają na to różne czynniki, m.in.: pole grawitacyjne Ziemi, opór atmosfery, oddziaływanie ciał niebieskich, pływy, opóźnienia zegarów atomowych.
3. Zmienność prędkości światła, zwłaszcza w jonosferze, która jest ośrodkiem zarówno o dużej zmienności dobowej, jak i długookresowej.
4. Podatność na odbicie sygnału satelitarnego od różnych obiektów przed dotarciem do odbiornika jest najpoważniejszą wadą systemów GNSS. Efekt ten – zwany wielodrożnością sygnału – może powodować błędy rzędu kilkunastu metrów. Podobne błędy w wyznaczaniu współrzędnych można zaobserwować również w miejscach o silnym polu elektromagnetycznym.
Geometria satelitów opisywana wartością liczbową jest tym parametrem, który – choć niezależny od użytkownika – może być na bieżąco monitorowany. W literaturze występuje pod angielskojęzycznym terminem DOP (Dilution of Precision) i opisuje układ satelitów na nieboskłonie. Wyróżnia się następujące terminy związane z DOP:
– GDOP (Geometric DOP) – geometryczne rozmycie dokładności, opisujące wpływ konstelacji satelitów na współrzędne X, Y, Z oraz pomiar czasu;
– PDOP (Positional DOP) – trójwymiarowe rozmycie dokładności, opisujące wpływ konstelacji satelitów na współrzędne X, Y, Z – wartość najczęściej interpretowana przez użytkowników;
– HDOP (Horizontal DOP) – poziome rozmycie dokładności, opisujące wpływ konstelacji satelitów na współrzędne X, Y;
– VDOP (Vertical DOP) – pionowe rozmycie dokładności, opisujące wpływ konstelacji satelitów na współrzędną Z;
– TDOP (Time DOP) – wpływ konstelacji satelitów na błędy czasu.
Różnicowa metoda pomiaru – DGPS
Pomiar współrzędnych za pomocą pojedynczego odbiornika obarczony jest dość dużym błędem. Zaczęto więc poszukiwać rozwiązań technologicznych, które mogą temu zaradzić. Okazało się, że błędy wyznaczania współrzędnych są zbliżone dla urządzeń pracujących w podobnych warunkach oraz znajdujących się od siebie w odległości ok. 35 km. Dysponując zatem obserwacjami z dwóch odbiorników i z tego samego okresu, możemy wyznaczyć między nimi poprawny wektor odległości. Jeżeli wektor ten dodamy do punktu referencyjnego o dokładnie obliczonych współrzędnych, uzyskamy właściwe wartości dla nowo rejestrowanych punktów.
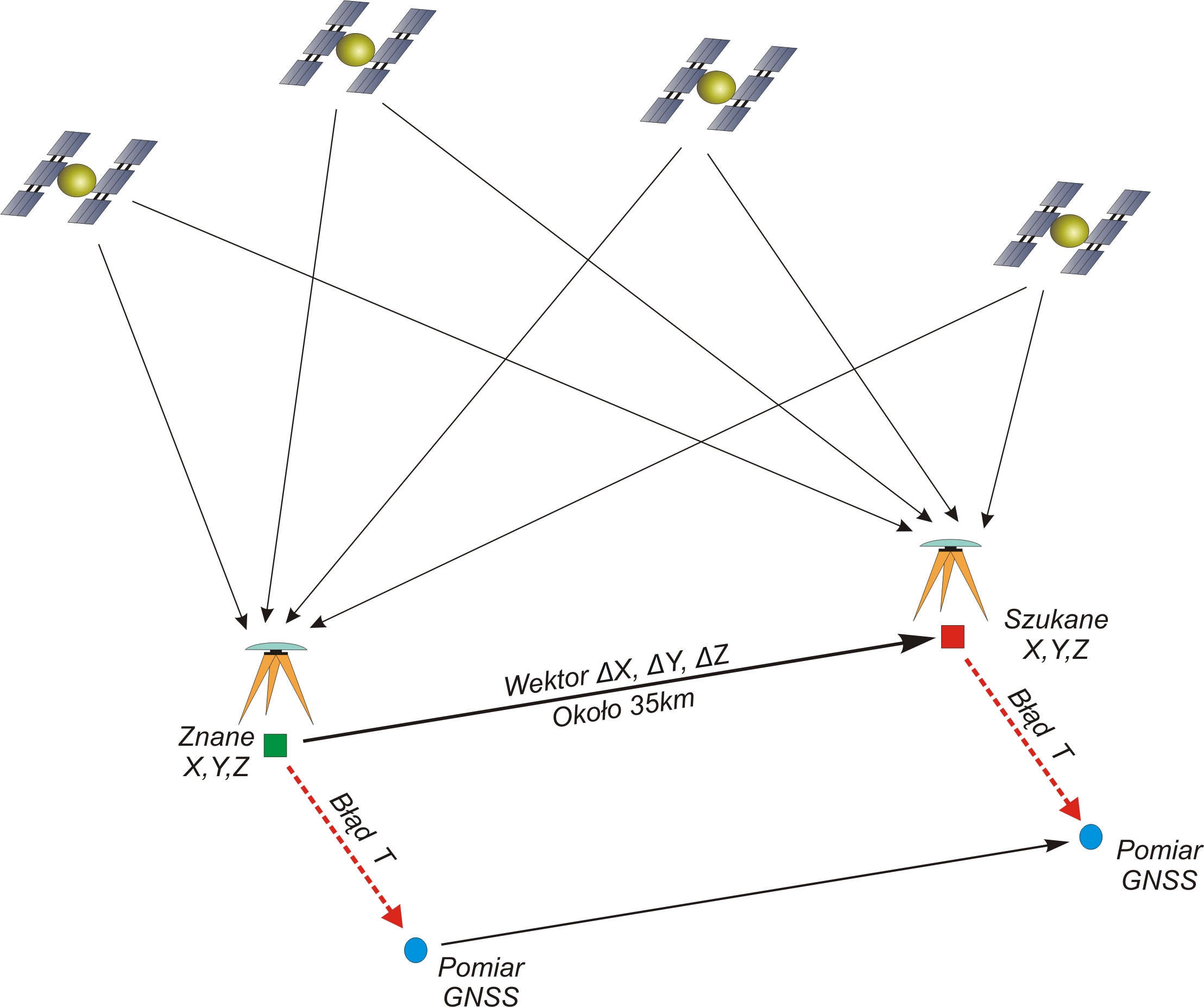
Ryc. Zasada działania różnicowej metody pomiaru
Metodę tę nazwano DGPS (Differential Global Positioning System). Polega ona na odbieraniu informacji generowanych przez stacje referencyjne umieszczone w punktach o znanych współrzędnych. Dane te zwane są poprawką korekcyjną.
Dostęp do stacji referencyjnych może być realizowany na następujące sposoby:
1. Skorzystanie z istniejącej lub zainstalowanie własnej stacji referencyjnej zlokalizowanej w pobliżu miejsca wykonywania pomiarów. Poprawki mogą być przesyłane drogą radiową w czasie rzeczywistym lub obliczone po dokonaniu pomiarów, z zastosowaniem techniki tzw. postprocessingu, za pomocą specjalnego oprogramowania.
2. Wykorzystanie globalnych systemów SBAS (Satellite Base Augmentation System), generujących poprawki przesyłane bezpośrednio do odbiorników drogą satelitarną. W wypadku Europy można odbierać poprawki z satelitów EGNOS, będących częścią projektu systemu nawigacyjnego Galileo. W praktyce prawie każdy odbiornik rejestruje sygnały EGNOS, jednak ze względu na niską elewację satelitów wysyłających poprawki (około 20° nad horyzontem), dostęp do tych sygnałów jest znacznie ograniczony (zwłaszcza w pomiarach terenów leśnych). Dokładność wyznaczania pozycji tą metodą jest lepsza niż 5 m.
3. Podłączenie do systemu stacji referencyjnych za pomocą łączy telekomunikacyjnych. Dla obszaru Polski jest to sieć ASG-EUPOS. Tą drogą uzyskuje się dostęp do ponad 100 polskich i zagranicznych stacji referencyjnych. Sieć ASG-EUPOS wprowadziła nową jakość w pomiarach odbiornikami GNSS, ponieważ jej ogólnopolski zasięg pozwala prowadzić pomiary z wysoką dokładnością w każdym miejscu naszego kraju.

Ryc. Rozmieszczenie stacji referencyjnych sieci ASG-EUPOS (źródło http://www.asgeupos.pl)
Budowę sieci ASG-EUPOS oparto na najnowszych rozwiązaniach technologicznych Błędy wyznaczania pozycji wahają się od kilku centymetrów do kilku metrów w zależności od warunków obserwacji i rodzaju wykorzystywanego serwisu.
Technologia stosowana przez sieć ASG-EUPOS polega na wykorzystaniu do korekcji obliczeń z kilku pracujących w tym samym czasie stacji referencyjnych. Odbiornik wysyła za pomocą łącza telekomunikacyjnego (sieci GSM, WLAN itp.) informacje o swoim położeniu, a następnie centrum obliczeniowe generuje wirtualną stację referencyjną znajdującą się w odległości kilku metrów od osoby wykonującej pomiary. W ten sposób zarówno stacja referencyjna, jak i odbiornik mają identyczne warunki pracy, a krótki wektor odległości gwarantuje bardzo dokładne wyniki dla wyznaczanych współrzędnych X, Y, Z.
Planowanie sesji pomiarowej
Szersza informacja o stanie systemu nawigacyjnego może być bardzo przydatna dla zaawansowanych użytkowników. Wiele cennych informacji, których standardowo nie wyświetla odbiornik GNSS, jest ukrytych w depeszy nawigacyjnej odświeżanej codziennie przez system. Na przykład w warunkach o ograniczonej widoczności (np. w drzewostanie) korzystniejszy będzie dostęp do sygnałów z większej liczby satelitów znajdujących się wyżej nad horyzontem. Chcąc uzyskać bardzo dobre wyniki, należy dążyć do minimalnych wartości współczynnika DOP, a dysponując odbiornikiem GNSS, warto wiedzieć coś więcej o aktywności systemów Glonass i Galileo. Te i inne informacje można odczytać za pomocą dedykowanego, najczęściej darmowego oprogramowania (np. Quickplan firmy Trimble). Podając wstępne parametry, takie jak przybliżona lokalizacja, data pomiarów i maska horyzontu, możemy odczytać następujące parametry:
– rozmieszczenie i trajektorie satelitów nad powierzchnią Ziemi;
– liczbę i widoczność widocznych satelitów w ciągu dnia;
– wysokość satelitów nad zadaną maską horyzontu;
– geometryczne parametry konstelacji satelitarnej (GDOP, PDOP, HDOP,
VDOP i TDOP);
– trajektorie satelitów obserwowane przez antenę odbiornika.
Wszystkie dane można zagregować w postaci gotowych do wydrukowania raportów, będących zarówno cenną wskazówką podczas pracy w terenie, jak i pozwalających świadomie zaplanować czas rejestracji sygnałów nawigacyjnych. Mając na uwadze pomiary w warunkach leśnych, warto pamiętać również o następujących faktach:
– ilość światła docierającego do dna lasu jest wprost proporcjonalna do siły sygnału satelitarnego;
– aktywowanie odbiornika należy przeprowadzić w terenie otwartym, gdyż dzieje się to zdecydowanie szybciej i przy mniejszym zapotrzebowaniu na energię;
– wykonywanie pomiarów w środku sezonu wegetacyjnego może istotnie pogorszyć dokładność współrzędnych lub nawet całkowicie uniemożliwić pomiary;
– wietrzna i wilgotna pogoda przyczynia się do zwiększenia zjawiska wielodrożności sygnału nawigacyjnego;
– zadrzewienie jest elementem zdecydowanie bardziej pogarszającym dokładność pomiaru niż wysokość drzewostanu;
– większość sygnałów satelitarnych na obszarze Polski odbierana jest z kierunku południowego, należy zatem unikać przesłaniania tej części horyzontu,
– odbiornik powinien mieć ustawioną maskę horyzontu na wartość minimum 10° oraz blokadę zapisu obserwacji przy wartości współczynnika PDOP większej niż 5–6.
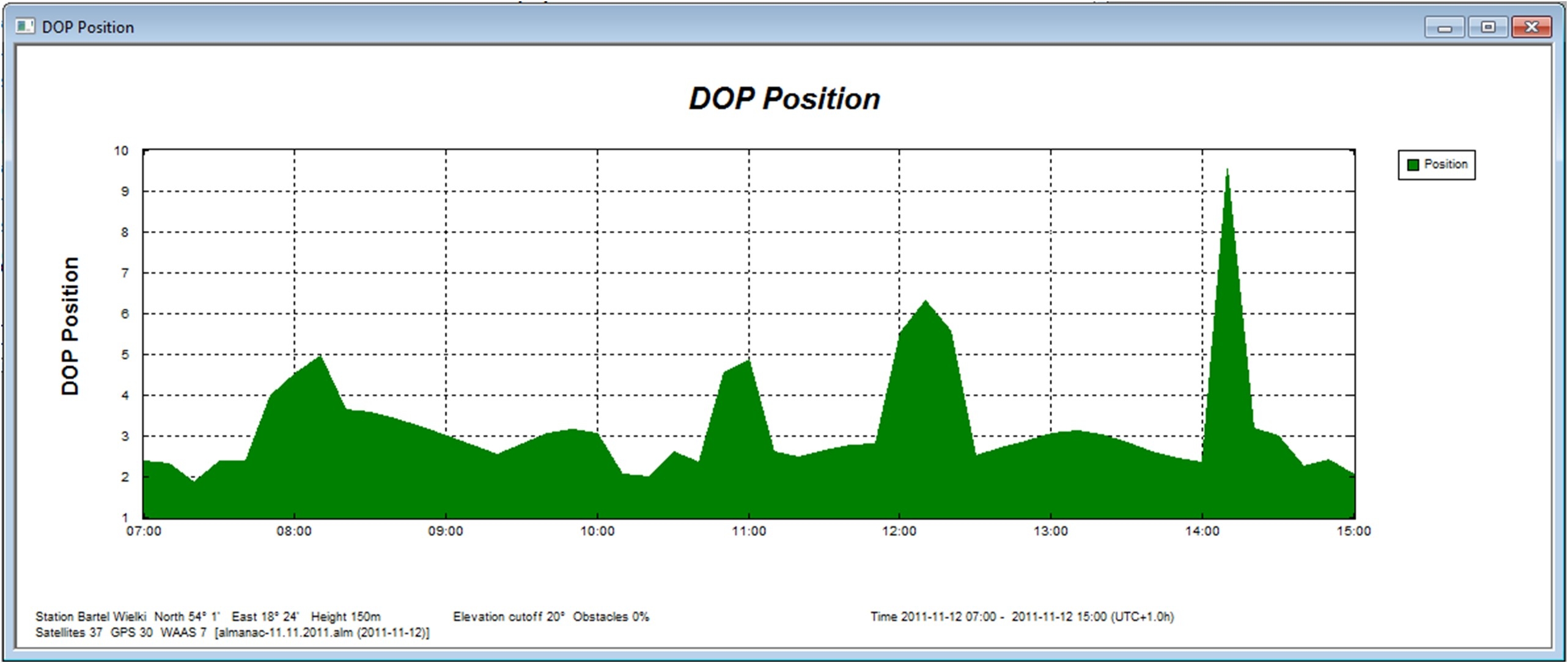
Ryc. Przykładowa prezentacja wskaźnika PDOP opisania w odstępach co godzinę.
na bazie publikacji „Geomatyka w Lasach Państwowych" zredagował Krzysztof Okła, DGLP